
現在,家庭内などで活躍するサービスロボットへの期待が高まっている.そのロボットのタスクの一つとして,利用者の代わりに望みの物を持ってきてくれる機能があげられる.家庭内では物が乱雑に置かれている場面が多く存在し,そのような場合に効率よく目的物体を認識し,把持することが重要となる.
本研究では,目的物体の認識と位置姿勢推定には部分的な隠れに対応するため局所視覚特徴を利用し,払い動作を含む把持計画により,乱雑に置かれた物体に中からより少ない動作で目的物体を認識し把持するシステムを構築する.
[参考文献]
- 近嵐公太,三浦 純, "双腕ロボットのための払い動作を含む物体把持動作生成", 2014年ロボティクス・メカトロニクス講演会, 2014.
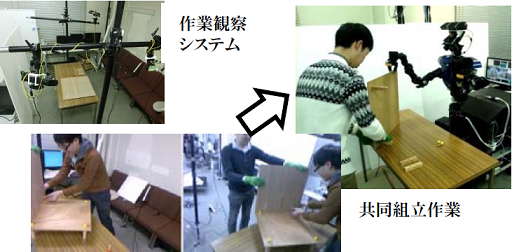
組立作業を題材として,人と協調して作業を行うことのできるロボットを開発している.適切な協調のためには,ロボットが人の動作を予測する必要があり,そのために作業の手順を記述した作業モデルを利用する.
作業モデルは物体の配置の記述を状態とし,人の行動を入力とする有限状態機械で表現する.作業モデルを人間同士の協調作業の観察から自動的に取得する研究も行っている.
[参考文献]
- H. Goto, J. Miura, and J. Sugiyama, "Human-Robot Collaborative Assembly by On-line Human Action Recognition Based on an FSM Task Model", Proc. HRI2013 Workshop on Collaborative Manipulation: New Challenges for Robotics and HRI, Tokyo, Japan, Mar. 2013.
- T. Hamabe, H. Goto, and J. Miura, "A Programming by Demonstration System for Human-Robot Collaborative Assembly Tasks", Proc. 2015 IEEE Int. Conf. on Robotics and Biomimetics (ROBIO-2015), pp. 1195-1201, Zhuhai, China, Dec. 2015.
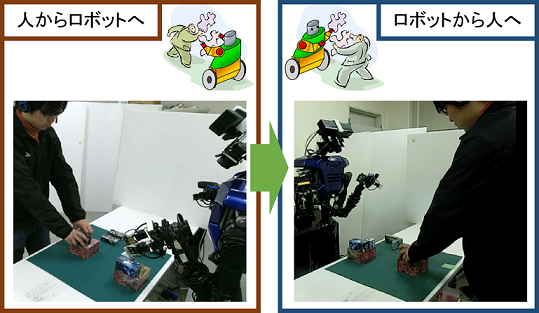
人から人への作業の教示は頻繁に行われるが,そのためには教示者と学習者が同じ時間・場所に存在する必要がある.ロボットを介して作業教示を行うことにより,そのような制約を外すことができる.
本研究では,人からロボット,ロボットから人への2段階の教示を考え,それぞれにおいて必要となるインタラクションについて研究する.教示を学習者の知識のあいまいさを減らす過程としてとらえ,そのあいまいさをDempster-Shafer理論を用いて明示的に表現するとともに,あいまいさを効果的に減らすためのインタラクションを選択する手法を研究している.人同士の教示を観察するための複数カメラを用いたシステムも構築している.
[参考文献]
- K. Yamada and J. Miura, “Ambiguity-driven Interaction in Robot-to-Human Teaching,” Proc. 4th Int. Conf. on Human-Agent Interaction, Singapore Oct. 2016 (to appear).
- 山田健太,近嵐公太,杉山淳一,三浦 純, "人型ロボットを介した作業知識の伝達", 2014年ロボティクス・メカトロニクス講演会,富山,2014年5月.
- 山田健太,三浦 純, "ロボットから人への作業教示におけるインタラクションのモデル化", 2016年ロボティクス・メカトロニクス講演会,横浜,2016年6月.
- 采誠一郎,大石修士,三浦 純, "人から人へのインタラクティブな作業教示の観察システム", 2016年ロボティクス・メカトロニクス講演会,横浜,2016年6月.
近年,脳波などの脳活動の情報を基に,ロボットを制御するブレイン・ロボット・インターフェース(BRI)の研究開発が行われている.BRIは身体に障がいを抱えている人でも使用できるという利点がある一方,従来の入力機器に比べて利用可能な情報量が少ないため,複雑な操作をすることができない.
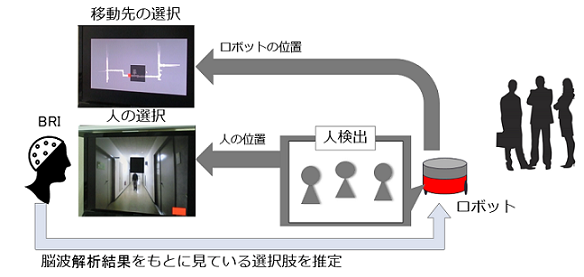
本研究ではロボットによる環境認識を基に,可能な限り人間による操作を少なくし,ユーザの判断が必要な時のみに選択肢を呈示することで,その選択に応じてロボットの制御を行うシステムの開発を目的としている.
開発したシステムは,定常状態視覚誘発電位(SSVEP)を用いることでテレプレゼンスロボットへの応用を想定し,ユーザの意思決定が必要な移動先の選択肢と,会話したい人物の判定にのみ選択肢を呈示してロボットの行動を決定する.それ以外の状況では,ロボットが自律的に行動することでユーザが画面を注視し続けることなくロボットの制御が可能となる.
[参考文献]
- 原知義,三浦純,大石修士,新海崇紘,南哲人,中内茂樹,"SSVEPを用いたブレイン・ロボット・インターフェース", 2016年ロボティクス・メカトロニクス講演会, 2016.
- 原知義,東和樹,新海崇紘,三浦 純,南哲人,中内茂樹","センサベース環境認識と定常状態視覚誘発電位に基づく意思伝達との組合せによる移動ロボットの遠隔制御,2014年ロボティクス・メカトロニクス講演会,2014.