ナビゲーション
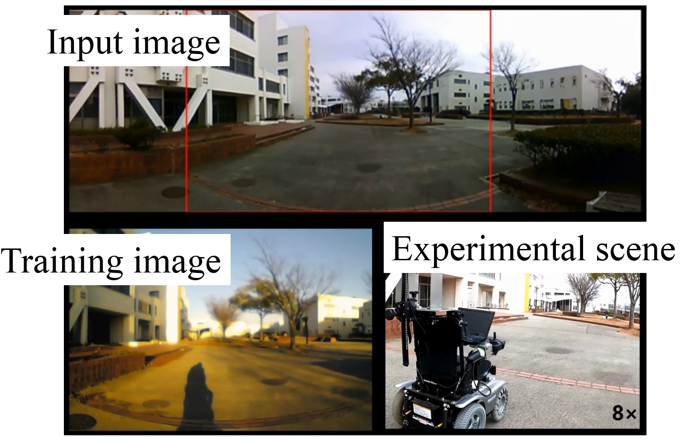
屋外ナビゲーションは大域的な位置決めを行っておおまかな進行方向を決定するとともに,局所的な環境認識に基づき安全な軌道を生成・移動する必要がある.
そこで,本研究では見えに基づく大域的位置推定と距離センサを用いた局所ナビゲーションを組み合わせて,指定された経路にそって自律移動できるロボットの開発を行っている.
[参考文献]
- Y. Inoue and J. Miura, “Outdoor Robot Navigation Based on View-based Global Localization and Local Navigation", Proc. 14th Int. Conf. on Intelligent Autonomous Systems, Shanghai, China, July 2016 (Best Student Paper Award Finalist).
季節や天候の変化にロバストな見えに基づく屋外位置推定
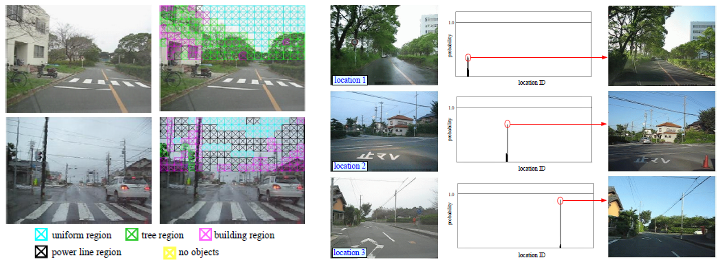
景色を見ながら自分の位置を知る方法を研究している.物体の見えは季節や天候によって変化するため,単純な画像の比較では正しく位置推定を行うことができない.
そこで,物体の見え変化を許容する物体識別器と物体の画像内の配置情報に基づく位置識別器の2段構成で位置推定を行う手法を開発した.識別器にはSVM(サポートベクトルマシン)を用い,さらにマルコフ位置推定の導入により季節や天候の変化に対して極めてロバストな位置推定を実現した.
[参考文献]
- 三浦 純, 森田英夫,ヒルド ミヒャエル,白井良明. "SVMによる物体と位置の視覚学習に基づく屋外移動ロボットの位置推定", 日本ロボット学会誌,Vol. 25, No. 5, pp. 792-798, 2007.
- J. Miura and K. Yamamoto, "Robust View Matching-Based Markov Localization in Outdoor Environments", Proc. 2008 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2970-2976, Nice, France, Sep. 2008.