高齢者の見守りは近年日本が直面している社会問題の一つである.高齢者を見守るシステムとしてはセンサや環境カメラを用いたものがあるが,環境カメラをすべての部屋に設置する必要性や常に監視しなければならないといったプライバシーの問題がある.
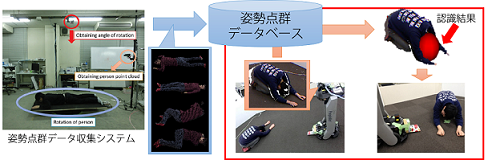
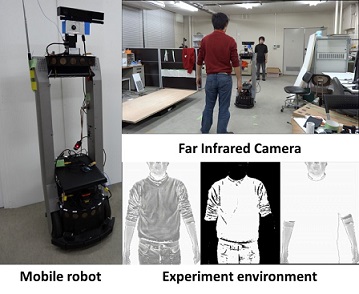
本研究では,ロボットに搭載されたカメラとセンサのみを用いた高齢者巡回見守りシステムを提案する. ロボット頭部に搭載された距離カメラから取得された点群データから臥位にある人物を検出して頭部位置の推定を行う. 頭部位置を推定することで,呼吸の有無や顔色といったバイタルサインを検出することが可能となる
[参考文献]
- K. Nishi and J. Miura, "A Head Position Estimation Method for a Variety of Recumbent Positions for a Care Robot", Proc. 2015 Int. Conf. on Advanced Mechatronics (ICAM-2015), Tokyo, Japan, Dec. 2015.
- 西佳一郎,三浦純, "見守りロボットのための多様な臥位に対応した頭部位置推定", 2015年ロボティクス・メカトロニクス講演会,京都,2015年5月.
ロボット技術を家庭に導入することにより生活支援を行う研究には,ロボティックルームやユビキタスホームなどの,家全体にセンサや人の支援のための機器をあらかじめ配置しておくことで人のサポートを行うものがあるが,,住居に必要なセンサや機器をすべて装備することは難しい.
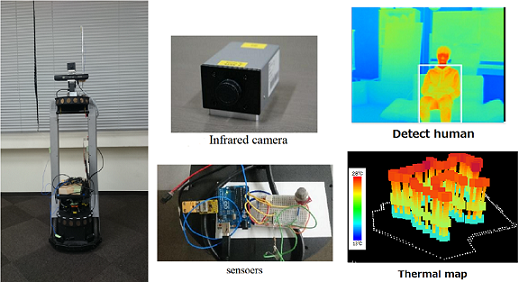
本研究では移動ロボットに必要なセンサを搭載し,生活環境を自ら動き回って,温熱・光・空気といった環境状態を居住者と同じ目線でセンシングし,その結果から機器制御や人への働きかけを行って,住居と居住者をつなぐことのできるロボットの実現を目指す.
[参考文献]
- 可児周平, 三浦純, "移動ロボットによる住環境センシングと生活支援への応用", 2015年ロボティクス・メカトロニクス講演会, 京都, 2015.
- S. Kani and J. Miura, "Mobile Monitoring of Physical States of Indoor Environments for Personal Support", Proc. 2015 IEEE/SICE Int. Symp. on System Integration (SII-2015), pp. 393-398, Nagoya, Japan, Dec. 2015.
温熱環境をセンシングし,温度情報を基に温度低下の原因を人に伝えたり,機器を制御して適正な温度を保ったりする試みがある.しかし,温熱環境における人の快適さ等は温度だけでは決定されず,人の着ている服の量や代謝量,温熱環境内の空気温度,放射温度,気流,湿度といった温熱環境要素に影響される.
本研究では移動ロボットにより温熱環境を計測し,Predicted Mean Vote(PMV) を用いて温熱環境評価を行なうことで,温熱環境要素を考慮したロボットの行動を決定する.
[参考文献]
- 出村充宏, 三浦純, 大石修士, "移動ロボットによる温熱環境評価", 2016年ロボティクス・メカトロニクス講演会, 横浜, 2016.