
Service robots have to have an ability of finding and picking a specific object in a pile of objects. Realizing the ability entails methods for localizing and/or search for an object efficiently and planning an effective hand motion.
[References]
- Miyazaki and Miura, AIM-2017

One of frequent service tasks for a robot is to bring a user-specified object from a distant place to the user. When a robot is at a remote site, an efficient collaboration between the robot and the user could enhance the object search performance. We have developed a robot system that carry additional wide angle camera for the user to independently search the remote site. This combination is effective and easy to use for the user to giving timely advice to the robot.
[References]
- Miura, Kadekawa, Chikaarashi, Sugiyama IAS-2014
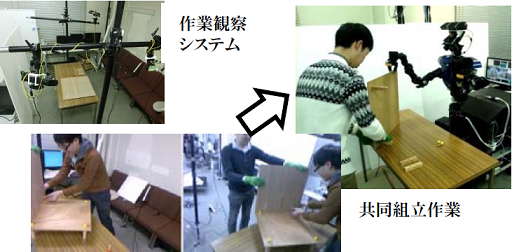
We have been developing robot systems that can collaborate with human in assembly tasks. A robot observes human activities and identify which step of assembly process they are now at by referring to a given process description. We also developed a programming-by-demonstration system that observes human-human collaborative assembly sequences and generates a collaborative robot program.
[References]
- H. Goto, J. Miura, and J. Sugiyama, "Human-Robot Collaborative Assembly by On-line Human Action Recognition Based on an FSM Task Model", Proc. HRI2013 Workshop on Collaborative Manipulation: New Challenges for Robotics and HRI, Tokyo, Japan, Mar. 2013.
- T. Hamabe, H. Goto, and J. Miura, "A Programming by Demonstration System for Human-Robot Collaborative Assembly Tasks", Proc. 2015 IEEE Int. Conf. on Robotics and Biomimetics (ROBIO-2015), pp. 1195-1201, Zhuhai, China, Dec. 2015.
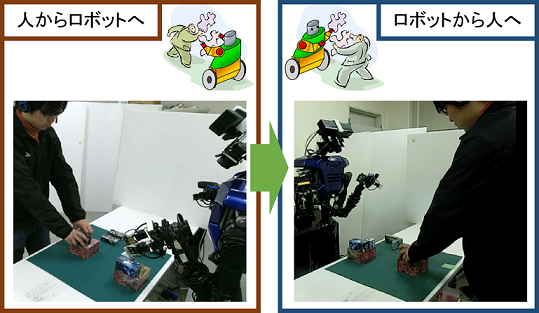
Knowledge transfer is ubiquitous at many situations at factories, schools, and home. We have proposed a framework in which a robot is used as media for task knowledge transfer from a person to another. We view the process of task knowledge transfer as a process of gradually reducing ambiguities in human or robot understanding of the knowledge, and developed a method of representing and reducing ambiguity using the Dempster-Shafer theory and an interaction planning.
[References]
- K. Yamada and J. Miura, “Ambiguity-driven Interaction in Robot-to-Human Teaching,” Proc. 4th Int. Conf. on Human-Agent Interaction, Singapore Oct. 2016 (to appear).