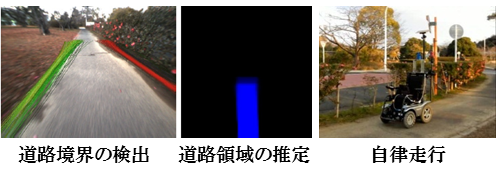
Estimating boundaries of roads (or traversable regions) is a fundamental function for outdoor navigation. We have been developing a road boundary estimation method using multiple visual features and flexible road models in a particle filter framework. The method can successfully be applied to various road shapes and boundary types.
[References]
- Y. Matsushita, J. Miura, "On-Line Road Boundary Modeling with Multiple Sensory Features, Flexible Road Model, and Particle Filter",Robotics and Autonomous Systems, Vol. 59, No. 5, pp. 274-284, 2011
- T. Chiku and J. Miura, "On-line Road Boundary Estimation by Switching Multiple Road Models using Visual Features from a Stereo Camera", Proc. 2012 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4939-4944, Vilamoura, Algarve, Portugal, Oct. 2012.
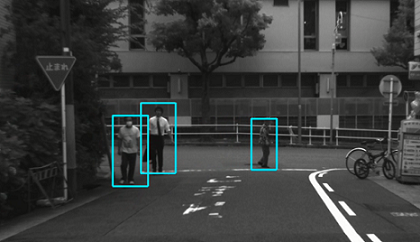
Pedestrian detection is necessary for safe driving. We have developed a pedestrian detection method using a high-definition 3D LIDAR that can reliably work for very distant pedestrians. The method has also been extended to use images for further increasing the reliability and the accuracy.
[References]
- K. Kidono, T. Naito, and J. Miura, "Reliable Pedestrian Recognition Combining High-definition LIDAR and Vision Data", Proc. 15th IEEE Int. Conf. on Intelligent Transportation Systems, pp. 1783-1788, Anchorage, AK, USA, Sep. 2012.
- K. Kidono, T. Miyasaka, A. Watanabe, T. Naito, and J. Miura, "Pedestrian Recognition Using High-Definition LIDAR", Proc. 2011 IEEE Intelligent Vehicles Symp., pp. 405-410, 2011.
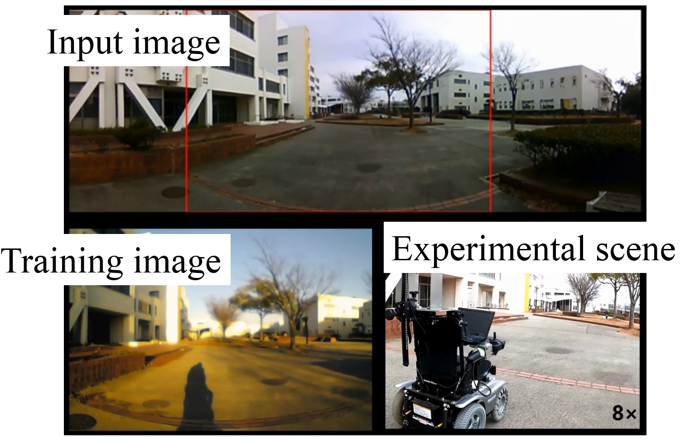
Outdoor navigation is usually decomposed into two levels: global localization and route selection at high-level and obstacle avoidance and/or road following at low-level. We developed an outdoor navigation method that combines an improved SeqSLAM-based view-based global localization and LIDAR-based local navigation.
[References]
- Y. Inoue and J. Miura, "Outdoor Robot Navigation Based on View-based Global Localization and Local Navigation", Proc. 14th Int. Conf. on Intelligent Autonomous Systems, Shanghai, China, July 2016 (Best Student Paper Award Finalist).
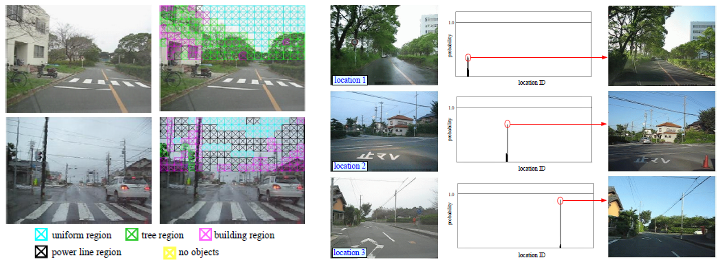
We have developed a two-stage SVM (support vector machine)-based view-based localization method. The first-stage SVM recognizes objects in the scene and describes each location with object placements. The second-stage SVM recognize each location based on the generated description. Combined with a discrete Bayes filter framework, the method can localize the vehicle very robustly and accurately against to drastic view changes due to changes of seasons and weather.
[References]
- J. Miura and K. Yamamoto, "Robust View Matching-Based Markov Localization in Outdoor Environments", Proc. 2008 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2970-2976, Nice, France, Sep. 2008.